Lei Fengnet (search "Lei Feng Net" public concern) : Author Xu Chao (Wei Yun Che Lian CEO, Zuozuo Automobile Joint CEO) and Li Linfeng (Wuhan Hai Wei CEO). Lei Feng network exclusive draft articles.
“After seeing the side of the mountain as a peak, there are different levels in the distance. You don’t know the true colors of the mountains, but you are in this mountain.â€
Dongpao's "The West Forest Wall" has been unmanned for nearly a thousand years.

Figure 1: Schematic diagram of the fatal accident at Tesla Autopilot

Figure 2: Photo of accident car
On May 7, 2016, a fatal accident in Tesla Model S in Autopilot mode occurred in Florida. The owner Joshua D. Brown died on the spot. Brown was a passionate Tesla auto-pilot hobby. In YouTube, there are several autopilot system road test videos. rest in peace.

Figure 3: V01 trailer shape and size reference
In the reference dimensions, the distance between the rear axle of the tractor and the front axle of the trailer is 9.85 meters minus the radius of the two wheels, which is 8.85 meters in length at the bottom of the trailer (orange part)/about 1.2 meters in height, and the estimated trailer width is about 3.5 meters.
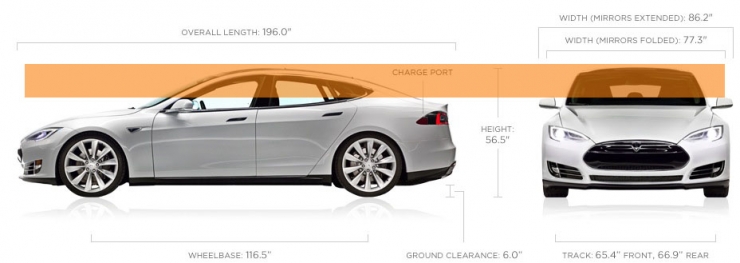
Figure 4: Tesla Size Reference
The Tesla Model S is 1.45 meters high, 2.2 meters wide, and 4.98 meters long. Orange is the part that was cut off by the trailer in an accident.
There have been a large number of articles, reviews and topics on the Internet related to this issue. Many of them have been carefully interpreted by professionals. Before the NHTSA survey report came out, it was difficult to obtain accurate conclusions based on limited information. However, it is undeniable that these comments, interpretations, discussions, and even arguments, whether correct or not, and the degree of professionalism, will bring unprecedented thinking and progress to the intelligent networked auto industry.
"No one drives, not considering safety equals murder, and not considering comfort is ridiculous" This is the view of Lao Cha (Xu Chao). With the Tesla incident, a good brother (Li Linfeng) was brought together to talk about “opening the perspective of a driverless Godâ€.
Most first-person shooter (FPS) and sports simulation (SPG) games are subjective “human perspectivesâ€.

Figure 5: Human Perspectives of CoD Modern Warfare and NFS Need for Speed
The real-time strategy (RTS), tower defense (TDS), and simulation building (SIM) games, such as Red Alert, Warcraft, DotA, etc., are almost all "God's perspective." Â Â

Figure 6: The Red Alert 2 and God's Perspective of the Sim City
Between the two, there is a Bird View bird watching the perspective, often used in small areas of augmented reality, such as the ADAS look around system:

Figure 7: Follow-up view of NFS Need for Speed ​​and Temple Escape

Figure 8: Hawkeye view in FPS game
The first-person experience of the human perspective is closest to reality, but the overall perception is weakest. This is why in most FPS-type games, an Eagle View is added to the corner of the screen to give the player overall control.
Similarly, the scene diagram at the beginning of this article will restore the entire accident scene in a simple and clear manner. This is also the main reason why the analysis video drove 160,000 VVs overnight. The subsequent photographs, however, do not allow you to know the full picture of the accident, even though they have "the truth of the picture." Therefore, restoring the truth requires a “God's perspective†to make it easy to understand.
Since everybody needs to be able to quickly understand the overall situation from God's point of view, how can we require machines that are "silly more" than people to learn and process data from the first person's human perspective, and to quickly and accurately identify and make decisions? Therefore, only from the perspective of humans consider the future of driverless driving. If the sensor is not enough, it will be hard to add. If the angle and accuracy are not enough, it will be upgraded. In addition, the deep learning and artificial intelligence algorithms and the continuous evolution of the hardware and software platforms and the continuous improvement of computing performance will promote The development of driving, this road is really right?
Regardless of macro control such as urban planning and military dispatch, or specific missile guidance, and the actual implementation of automatic piloting of aircraft, almost all the real-time processing of human perspective data collection is excluded from the main methods, and some even have no assistance.
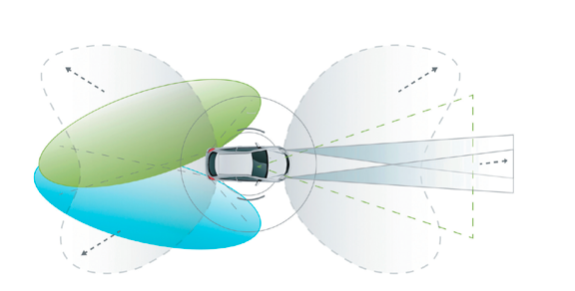
Figure 9: Monolithic sensor configuration
Even if the NVidia Drive PX2 consumes 250W, the top-level configuration of the NXP BlueBox 2xAPEX2CL+4xA53+GC3000+8xA57 or the 12Tera/s of the Mobileye EyeQ5 has a bunker computing capability, accompanied by a cost-sensitive sensing front end that can cost anywhere from tens to hundreds of thousands. All vehicles, observations, perceptions, and even computational processing capabilities fully meet or exceed humanity. However, because of the incomplete predictability of the behavior of traffic participants, these "next generation supercomputers" from the perspective of humans will still have no small impact. Probability of missed or misjudged. The perception and decision-making of driverless driving is not a child's play. Any failure, whether it is perception, integration or decision-making, is a matter of life. The low end is not enough, but the high end is extremely expensive but it cannot guarantee the accuracy and reliability. With a single cost, it has been difficult to extend effective driverless driving to every car, let alone all traffic participants.
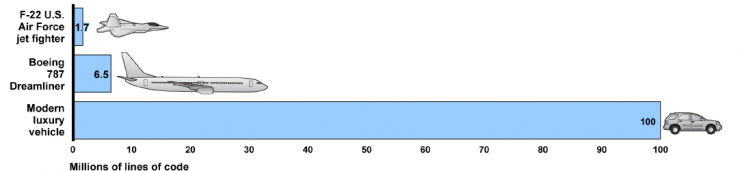
Figure 10: Comparison of Code Size of F22/B787/Luxury Cars
The dramatic increase in the amount of code and cost brought about by a large number of design redundancy, and the attendant complexity of the system significantly increase the overall reliability decline, which is also a problem that cannot be ignored.

Figure 11: Results of Euro NCAP AEP 2013
Feng Ge (Li Linfeng) drives the Golf 7 top one day and brings the whole family to a younger age. It is excited to open the AEB function, ready to show off, and tolerant of frequent "unreasonable" emergency brakes, the two sons burst into tears, and finally they were rushed to the summit. The dog ended up in desperation, but desperation had to turn this feature off and never turned it on again. As a Euro NCAP evaluation score of 2.2 Good, such safety is sufficient, but the conservative strategy has seriously sacrificed comfort. Of course, some people say that comfort is not important compared to losing one's life. Lao Cha (Xu Chao) asked: What kind of care does the user feel about the system?
Every unmanned system architect and programmer writing a strategy wants to be a good person, but under the path of monotonic perception and individual intelligence, they are becoming choices of “murderers†or “rapists†all day long. swing left and right. From a purely human perspective, no one can be certain that the realization of his perceptions and decision-making is "accurate and perfect." Now he is afraid and will not dare to do so in the future.
Unless, from a few angles to open the "unmanned perspective of God":
Observe and perceive the overall condition of traffic from the perspective and angle of macro
Current unmanned vehicles mainly rely on sensors such as vision, millimeter-wave/ultrasonic radar and laser LiDAR installed on the vehicle to sense the surrounding environment, and use intelligent decision-making and execution units to control the behavior of the vehicle.
In the unmanned environment of God's perspective, it may be considered that the sensor system originally installed in the vehicle is deployed as a fixed infrastructure in a road section with a complex traffic environment and becomes a Road Side Sensors Unit (RSSU) with a low traffic rate. The country road section can rely on the existing vehicle perception mode as driving assistance, or temporarily do not allow driverless mode. This can solve many current practical problems:
Perceived system and decision-making system costs will not fall to the vehicle terminal;
New sensing devices and algorithms can be uniformly planned and upgraded;
What can be legislated to define "unmanned" road sections and which are not;
Road side perception and reliability and cost of related electronic equipment will be reduced from "vehicle" to "industrial control";
Someone here will say that this is L3 rather than L4, not the full sense of drone. Let us analyze driving behavior, core purpose, and popularization costs. As long as there is a cost for a vehicle-mounted driverless system, someone will choose not to install it, and it will have to go to the level where legal enforcement is required. The cost difference must be reduced to a very low level. Degree. If this is true, then the cost of deploying as an infrastructure will also be greatly reduced.
Specific scenes use multiple perceptions and pattern matching to identify moving objects
The vehicle-based single-sensory decision-making system uses constant-updating hardware and deep learning, artificial intelligence algorithms and systems to adapt to “all†possible scenarios, even if the vehicle is on a certain area of ​​road for 99% of the time, only 1% or even 0.001%. The opportunity to go to a strange place, then the system must also be 100% prepared for this, does not allow a bit of error, this redundancy is necessary but not economical.
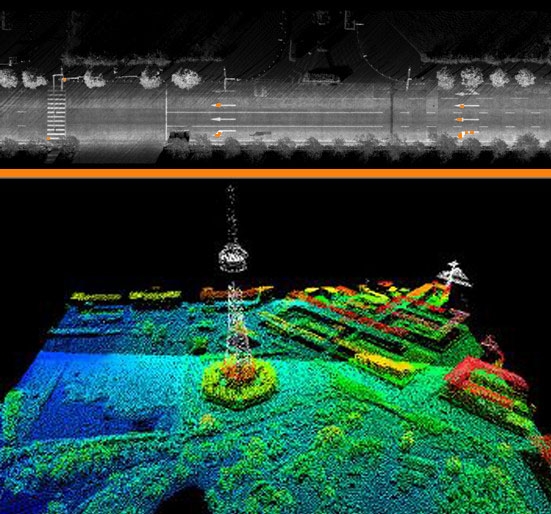
Figure 12: Road and City Point Clouds Mapped with LiDAR
From the perspective of God, LiDAR, vision systems, and millimeter-wave radar are installed in similar street lights. Each sensor system can have different cost configurations depending on the specific conditions of the 200m to 1km road that it is responsible for. Sensing and recognizing parts only need to do differential image processing based on fixed point cloud, taking into account changes in geography and climate environment, such as adding wet skis, wind direction, visibility and animal migration parameters, these auxiliary information are relatively easy to implement .
Perceiving and recognizing dynamic objects in a familiar, static environment is more than an order of magnitude more efficient and accurate than doing stranger things to all surrounding environments.
Traffic participants report accurate location, status information and action intentions
In the previous articles, Lao Cha mentioned the development of driverless driving. It was not enough to focus only on sensory awareness and individual intelligence. Traffic was multi-participated. The passing Mr. Brown also captured the helplessness and helplessness of the Tesla Autopilot system in a video on April 10, 2016, when a large truck was crazy and was on the line. The Tesla, which was circulated online in May, was photographed. ACC accelerates the rear-end fault bus video also vividly. The notion that "as long as you are smart enough to be completely innocent and indifferent" is totally wrong.
In addition to roadside RSSU perception and processing, from the vehicle to the future pedestrians and even cats and dogs, can be equipped with high-precision positioning unit and V2I/V2V communication unit, on the road side of these devices, its technical stability (can dozens of Year-on-year) and cost, bedding advantages over on-board systems. For example, in this case, the V02 Tesla Model S has differential or star base-based GNSS and V2I/V2V modules, while the trailer tractor of the V01 long trailer has a GNSS enhancement module, and there are two Trailer Trailers that can be positioned. The body position is acquired in real time at the exact position.
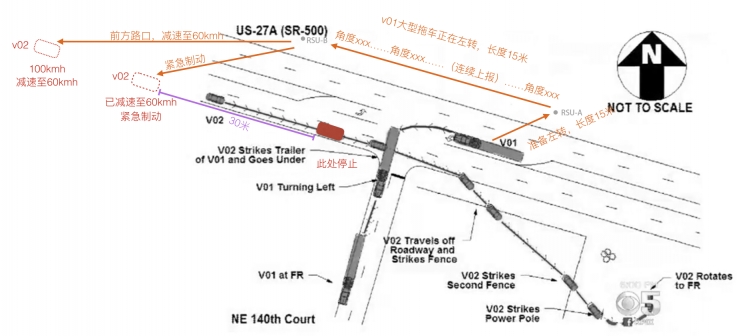
Figure 13: V01 and V02 Containing GNSS and Networking Systems
With one or more roadside communication units RSCU and roadside sensing units RSSU, V01 reports its own turning intentions to the RSU-A in advance and submits its own morphological information, then the RSU-A can notify the neighbors before V01 begins to make a turn. Several RSUs, such as RSU-B, and constantly report on the location and attitude of V01 and road occupancy. Nearly several kilometers away from the RSU informed all potentially affected vehicles including V02, while RSU-B did not even come from RSU. - V01 information forwarded by A may also be notified in advance that V02 will have an intersection at the front and run at a reduced speed, so that this event can be completely avoided.
The results of macro-awareness are combined to analyze, formulate and continuously improve scheduling strategies and security boundaries
There is RSSU's perception and RSCU's notification, how to make decisions, which is the distributed information processing mechanism mentioned in the previous article. Each RSCU/RSSU is responsible for making decisions on its own block and notifying neighboring blocks. For various levels of events, neighboring blocks select the notification of the vehicle according to the “Global Policy Matrix†and receive the The notified vehicle may or may be required to quickly control the vehicle speed within the safety boundary. After entering the emergency block, the vehicle may be automatically and safely stopped according to the instructions. The regional central control node RCCU is responsible for the notification based on big data analysis, optimization of policy matrix after learning, issuance, and emergency notification in the entire region.
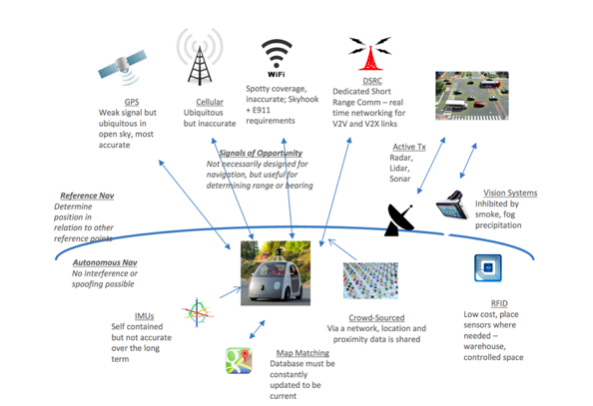
Figure 14: Information map of the complete Smart Connect car
To achieve the vision of God, we need to achieve the following key technologies:
1. Be able to report to the RSU in advance on its own follow-up behavior intentions, size, status, etc., V2V/V2I communication, perceived decision making, and low latency implementation
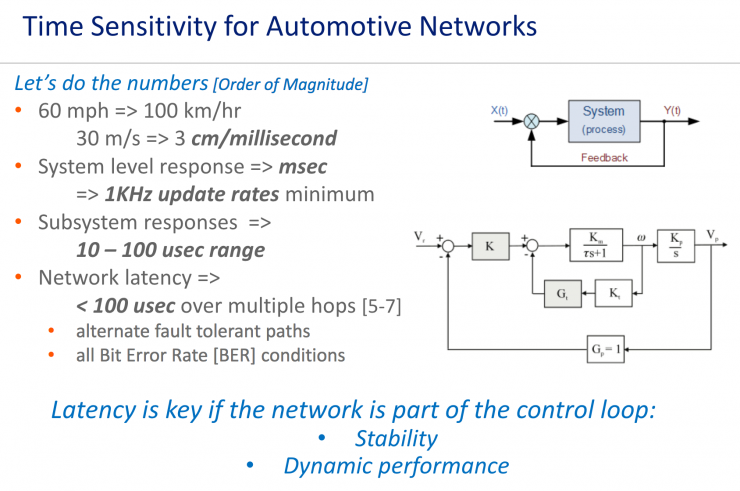
Figure 15: Web-based delay required for droneless operation in pure communication mode with Spectracom calculations
Generally, the 802.11p technology has a delay of 50ms, and the delay using LTE-A technology is about 42ms, while the delay using 5G/LTE-V is 1ms, and the new-generation 5.9GHz DSRC can achieve 0.2ms. It can be seen that even DSRCs at 5G and 5.9GHz cannot independently perform driverless driving. But God's perspective has two core keywords: “macro†and “pre-judgment,†so there is no such high demand for human perspective as it is for real-time performance. The V2V/V2I and I2X technology in the perspective of God's perspective can already achieve "super-perceptual distance," which spans no more than one RSCU/RSSU, no two, and no two n. The communication delay between RSCUs is fixed. Multiple groups of linkages can greatly increase the safety distance and redundancy time that can be used to handle events. In addition to monitoring roads, RSSU can also monitor the behavior and routes of some potential and other traffic participants outside the road, including large animals such as elk and grizzly bears that are ready to cross the road, or small animals such as herds.
Of course, when it comes to network connected systems, there are network information security issues. First, this network must be a private network; secondly from the perspective of legislation, attacking the bank's network system is called financial information crime. Attacks on intelligent networked vehicles and related facilities should be based on murder.
2. High-precision coordinate positioning and motion tracking system
The accuracy of 10 meters of traditional GPS/GNSS system is obviously not enough. The positioning system of Yami or even centimeters that considers the deployment cost and practicality under dynamic conditions is the necessary condition for starting unmanned driving from the perspective of God based on macro command and dispatch.
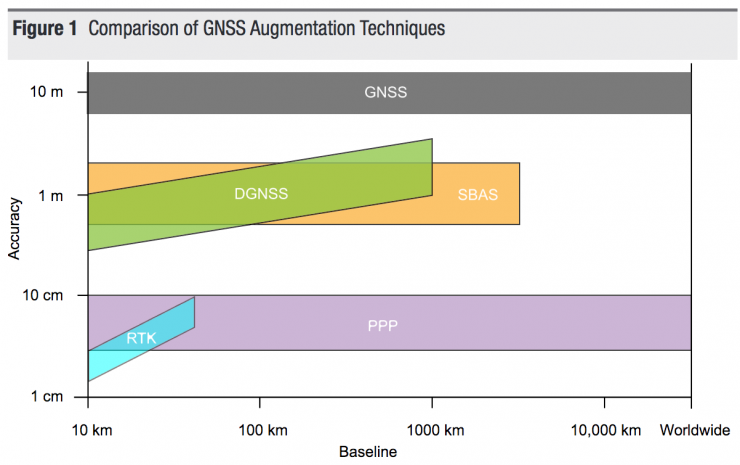
Figure 16: Comparison of the accuracy of GNSS and various enhancement systems
From the above figure (from "Precise Positioning with NovAtel CORRECT Including Performance Analysis"). No matter what the baseline range, the traditional GNSS system can only reach the accuracy of 10 meters, while the SBAS satellite-based augmentation system can achieve the accuracy of 5000 meters under the baseline, and the differential DGNSS can provide the submeter to the meter in the 1000km baseline. Accuracy, but based on the RTK model of PPP and CORS continuous operation of the actual wide-area reference station, can already reach the global coverage of 2 ~ 10cm level accuracy.
With the low-cost CORS+SBAS, the data density is supplemented by the local IMU inertial measurement unit, which increases the data output from Hz to over 100 Hz. It fully meets the requirements of "line-level" positioning and 10ms time slot attitude/position reporting.
What are the potential problems and ways of dealing with God?
The cost of coverage is high . Response: Let OEMs take a certain percentage of the cost of preparing a single part of the driverless vehicle to the government for infrastructure construction, and enforce the drone-related facility equipment and regulations during road reconstruction.
Traffic participants who do not follow intentions and forecasts. Response: For the sudden turn of the electric car and sudden flash of old lady, still need local perception intelligence system and the driver itself to deal with. Of course, from the perspective of legislation, offenders can also be mistaken.
Network information security issues. Respond: Magic is a high ruler and harsher than a felony.
God is also crazy! Each node enters the crazy AlphaGo mode, ready to destroy humans. Response: Each city should be equipped with a Will Smith or Keanu Reeves.

Figure 17: God is Crazy, Rushing or Crash
Opening the perspective of the unmanned God sounds good, but sensational awareness and intelligence are at least as important now. First, after all, human beings are smarter and God is easier. Secondly, the infrastructure, standards, and deployment of the infrastructure required by God's perspective are far from adequate. Only comprehensive, macro, and long-term considerations cannot and do not necessarily require unbridled upgrading of monomer capabilities and an "arms race" in cycling.
Hundred years of accumulation and heritage of traditional automobiles, many aspects are not simply subverted by IT systems and "Internet concepts", and the rigorous processes of OEMs and large Tier1s, although they feel that something new is not going so fast, But overall it is stable and reliable.
Traditional manufacturers must learn new ideas and perspectives from new players, and new players must have "respect for the heart" and "subversion". Both practitioners and users should not only affirm the courage of Tesla and related suppliers and promote the industry, but also objectively view its efforts to improve the driving experience to reduce accidents and fatal accidents, but also to recognize Knowing that over-promotion and misleading of new technologies will cause irreparable damage and harm to users and even the industry.
Elon Musk is just a person, and the media and capital have packed him into gods. Under such crazy rekindling movements, it brings serious damage to the industry. Mr. Brown is just the next specific victim of this harm. However, from another point of view, Tesla and all Internet-based car makers will find it difficult to reach today without the capital's blessing. The bad nature of rapid arbitrage in the capital market is doomed to this tragedy. On the other hand, whether Google or Musk, they are all deploying "God's perspective", regardless of whether Space X lowers the launch cost of orbiting satellites, or Google X's low-altitude satellite communication coverage plan, allowing low-cost deployment of autonomous and controllable wide-area data links. It is possible to get rid of traditional operators' control and imprisonment of communication systems over the years.
He had communicated in depth with some friends in the capital circle about their opinions on the automotive industry investment. One of the real viewpoints is: “The automobile industry has a large capital volume, but it has a long cycle, involves many links, and has a large time risk. Unlike the TMT industry, Trial and error costs are low and fast, and since capital is not lacking in projects such as TMT, most of the auto industry can only rely on wait and see."
Lao Cha (Xu Chao) believes that as long as it is not overly quick and profitable, there is plenty of potential for investment in the relevant areas of intelligent network-linked vehicles. From the perspective of realizing the realization of the unmanned God perspective, there are at least several directions worthy of deep concern: low cost and high cost. Accurate positioning, autonomous controllable ECUs and execution units and related systems, medium and short-range low-delay communication systems (including DSRC/WAVE, LoRA, and Li-Fi), wide-area object-link communications (LTE-V, LTE Cat-0/ M1/M2), deep learning, big data, occupant condition monitoring, new HMI systems, applications of AR systems in the transportation sector, low-cost sensors and fusion systems, and related SoC system-on-chip designs.
Returning to the driverless development path itself, a profound question lets everyone think together: “Is there a drone function or scene that cannot be achieved by God's perspective but can be achieved only by the human perspective?â€
The author's introduction:
Xu Chao: Starting from the Internet and integrated circuits, car networking, automotive electronics, and intelligent network-linked automotive entrepreneurship, they can both chat with experts and scholars, and they can also exchange tips with profiteers. Currently as a strategic investor and co-CEO of JointWyse Automotive, he is quick to evaluate the evaluation, site construction, consulting and operation of the intelligent network, and as the founder and CEO of WayWings, he is in the smart Network layout and cloud service areas are fully deployed.
Li Linfeng: Wuhan Haiwei CEO. Automotive electronics, bus, map navigation, space geography, surveying and mapping experts, the best product architect ever (possibly) cooking. At present, as the founder and CEO of Highway Tech, it is advancing rapidly on ADAS, high-precision positioning navigation, and next-generation HMI systems.
The FirstPower CFPS(2V) and LFPS(6V/12V) series stationary batteries (OPzS battery) are the newly products which were developed at the end of 2005.
The performances meet the standard DIN40736 and IEC60896-21...Characteristics Positive plate: It is a tubular plate that can prevent the active material from falling off. The grid of positive plate is Pb-Sb multi-alloy
Separator: With the combined application of porous rubber and porous PVC, the separator has a high porosity and good corrosion-resistance
Acid-proof bolt: It is of a special shape of funnel having the function of filtering acid smog and retarding flame. It can measure the density and temperature of electrolyte.
The design life is more than 20 years
Ensuring sufficient electrolyte for battery discharge
Storage Power Opzs Battery,Solar Storage Battery Opzs Battery,Opzs Battery
Firstpower Tech. Co., Ltd. , https://www.firstpowersales.com