Keywords: superheated steam temperature, Elman network, implicit generalized predictive control (IGPC), direct identification, controller parameters
1 Introduction The superheated steam temperature is one of the important indicators of the operating quality of power plant boilers. If the superheated steam temperature is too high or too low, it will significantly affect the safety and economy of the power plant. During the operation of the boiler, the temperature of the superheated steam must be kept near the specified value. However, the dynamic characteristics of superheated steam temperature will change with the change of load, and at the same time it is a link with large delay and large inertia [2]. It is difficult to obtain satisfactory control effects using traditional PID controllers. Generalized predictive control absorbs the advantages of predictive control and adaptive control. It uses the actual output of the object and the applied input to identify and correct the model parameters online in real time and can be used in time-varying dynamic systems [3]. However, solving the optimal control increment requires online recursion to solve the Diophantine equation and multiple matrix inversion operations, which makes the calculation of the control system very large and affects the real-time nature of the control system. This paper proposes implicit generalized predictive control based on Elman network to directly identify controller parameters, which not only greatly reduces the online calculation of the control system, but also makes the modeling and identification of object dynamics easy to implement. It is used in the simulation of superheated steam temperature control system, and the results show that the system has good performance.
2 Elman regression neural network prediction model The neural network has the characteristics of being able to approximate any continuous function and its various derivatives with arbitrary precision by appropriately selecting the network hierarchy and the number of hidden layers, so it is widely used in industrial process modeling and control. Unlike static feed-forward neural networks, dynamic recursive networks have the ability to map dynamic features by storing internal states, so that the system has the ability to adapt to time-varying characteristics and is more suitable for dynamic system identification [1]. Represents the development direction of neural network modeling, identification and control.
Elman type regression neural network is a kind of dynamic recurrent neural network. It can be generally divided into four layers: input layer, hidden layer, receiving layer, and output layer (the number of hidden layer units is the same as the number of receiving layer units), and its input layer, The connection of hidden layer and output layer is similar to feedforward network. The input layer unit only plays a role in signal transmission, and the output layer unit plays a linear weighted sum function. Hidden layer units can have linear and nonlinear excitation functions, usually the excitation function is taken as a Sigmoid nonlinear function. The receiving layer is used to memorize the output value of the hidden layer unit at the previous moment, which can be regarded as a one-step delay operator.
When the Elman network is used to identify single input and single output objects, only one input unit and one output unit are needed, and the input of the hidden layer unit (set its number to n) is n + 1, which is much larger than the corresponding static network structure. simplify. In addition, the dynamic characteristics of the Elman network are only provided by the internal connection, without using the state as an input or training signal. The structure of the Elman regression network with single input and single output is shown in Figure 1.
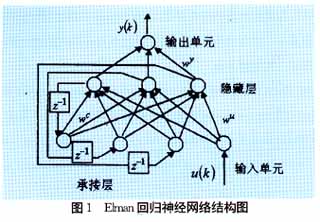
Let y (k) denote the output at time k u (k) denote the input at time k, wc (k) denote the connection weight between the hidden layer unit at time k and the receiving layer unit, and wu (k) denote the hidden layer at time k The connection weight between the unit and the input unit, wy (k) represents the connection weight between the hidden layer unit and the output unit at time k. Then the network can be described as 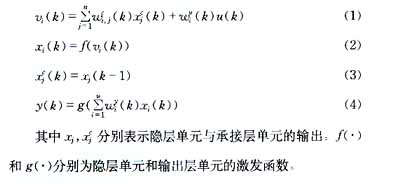
When training the Elman network, the BP algorithm, DBP algorithm, etc. can be used [6].
3 Implicit generalized predictive control for direct identification of controller parameters based on neural networks Implicit generalized predictive control for direct identification of controller parameters still belongs to the category of model predictive control, so it still has three characteristics of model predictive control: prediction Model, rolling optimization, feedback correction.
3.1 Predictive model After the actual input and output data of the object are used to train the Elman network, it can be used as the predictive model of the control system. Used to predict the output of an object.
Set polynomial Fj 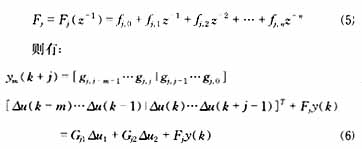
Where ym (k + j) represents the predicted output of the object at k + j time. The first item to the right of the equal sign is the effect of the input at k and later on the output, the second item is the effect of the input at the time before k on the output, and the third item is the effect of the output at k and the previous time on the future output.
In the formula 
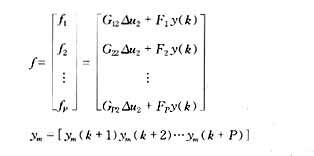
Then you can get the matrix equation of the predicted value ![]()
3.2 Rolling optimization The optimization goal of the generalized predictive control law is 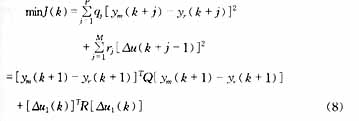
ym (k + j) is the model predicted output value, yr (k + j) is the expected output value, qj, rj are non-negative weighting coefficients, for objects with pure delay, the first few values ​​of qj should be 0, P is Optimize the time domain, M is the control domain, M ≤ P (P = M in this article). 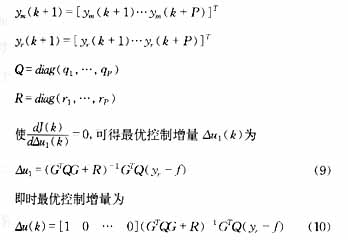
3.3 Feedback correction The implicit generalized predictive control based on the neural network directly identifying the controller parameters is a closed-loop control algorithm. In the actual situation, the model predictive output and The gap between the actual output of the objects is called the prediction error. The prediction error is used as the training signal of the Elman network to adjust the weight of the network, so that the neural network prediction model accurately reflects the real-time dynamic characteristics of the object.
3.4 Algorithm for directly identifying controller parameters 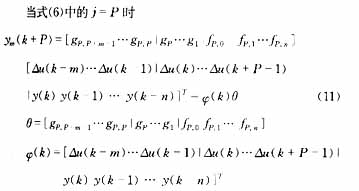
It can be seen from equation (9) that the generalized predictive controller can obtain the predicted optimal control increments Δu (k), Δu (k + 1), ..., Δu (k + P-1) at time k. From the previous input and output data of the system, φ (k) can be obtained. The prediction optimal control increment is input to the neural network prediction model one by one, and the prediction outputs ym (k + 1), ym (k + 2), 
At each moment k, the P step predictive value ym ((k + P) / k) = φT (k) θ 
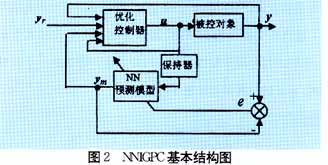
Therefore, the optimal value of the control increment Δu1 can be obtained according to equation (9). The structure of implicit generalized predictive control for directly identifying controller parameters based on neural network is shown in Figure 2.
3.5 Implicit generalized predictive control algorithm based on neural network to directly identify controller parameters is summarized as follows: â‘ Elman neural network is trained offline according to the actual input and output data of the object, and the trained Elman network is used as the prediction model of the object.
② Set the initial value P, M (in this paper P = M), m, n, R, Q, and collect the actual input and output data of the object to get the initial value of φ (k), y (k + P) 
⑤ Calculate the control laws Δu (k), Δu (k + 1),…, Δu (k + P-1) from equation (9), and apply Δu (k) to the object.
â‘¥ According to the difference between the actual output y (k) of the object and the predicted output ym (k) of the model, the weight of the neural network is corrected online. The neural network prediction model accurately reflects the dynamic characteristics of the object.
⑦Sent the control laws required in ⑤ into the neural network prediction model one by one, and obtain the prediction outputs ym (k + 1), ym (k + 2), ..., ym (k + P) of the object.
⑧ Collect the previous input and output data of the system Δu (km), Δu (km-1), ..., Δu (k-1) and y (k), y (k-1), ..., y (kn) and The data obtained in ⑦.
⑨ Let k = k + 1, return to ③.
4 Applied to the simulation study of superheated steam temperature control Modern power plants generally use a cascade steam temperature adjustment system for superheated steam temperature adjustment. The transfer function of the leading area of ​​the controlled object used for simulation is: G01 (s) = ![]() The transfer function of the inert zone of the controlled object is: G02 (s) =
The transfer function of the inert zone of the controlled object is: G02 (s) = ![]() The transfer function of the secondary controller is: GP (s) = 2.3, and the transfer function of the main controller is:
The transfer function of the secondary controller is: GP (s) = 2.3, and the transfer function of the main controller is: ![]() It can be seen from the transfer function of the inert zone of the object that the inertia and delay of the inert zone are large. Moreover, the dynamic characteristics of superheated steam temperature will change with the change of boiler load. Therefore, the control effect of this system is not good. Now the NNIGPC proposed in this paper is added to the control system to replace its main regulator, and the rest of the system remains unchanged. When the outside world applies a step disturbance to the system, the simulation results of the system are shown in Figure 3.
It can be seen from the transfer function of the inert zone of the object that the inertia and delay of the inert zone are large. Moreover, the dynamic characteristics of superheated steam temperature will change with the change of boiler load. Therefore, the control effect of this system is not good. Now the NNIGPC proposed in this paper is added to the control system to replace its main regulator, and the rest of the system remains unchanged. When the outside world applies a step disturbance to the system, the simulation results of the system are shown in Figure 3.
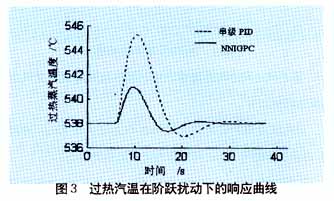
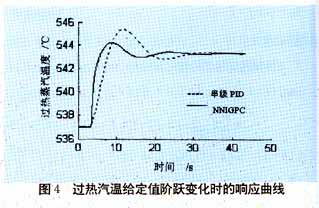
When the given value of superheated steam temperature changes stepwise, the simulation result of the system is shown in Fig. 4.
It can be seen from the simulation results that the neural network implicit generalized predictive control (NNIGPC) is significantly better than the traditional PID controller in terms of tracking set values ​​and suppressing disturbances.
5 Conclusion The implicit generalized predictive control based on neural network proposed in this paper solves the optimal control increment by directly identifying the controller parameters, without recursively solving the Diophantine equation and matrix inversion, so the calculation is small and the real-time , And its control performance is excellent. Especially for objects with time-varying, large time delay and large inertia like superheated steam temperature, it can meet the control quality requirements under various working conditions, has strong practicability, and has good application prospects.
references:
[1] Xie Qingguo, Wan Shuyun, Zhao Jin. An Elman regression network design method [J]. Journal of Huazhong University of Science and Technology, 2002, 30 (3): 22-24
[2] Li Zunji. Thermal automatic control system [M]. Beijing: China Electric Power Press, 1997, 74-83
[3] Wang Wei. Generalized predictive control theory and application [M]. Beijing: Science Press, 1998, 148-154
[4] Sanaye Pasand M, Malik O P. High speed transmission system direcTIonal protecTIon using an Elman network [J]. IEEE, Trans.On Power Delivery, 1998, 13 (4): 1040-1045
[5] Clarke, DW, Mohtadi, C. and uffs. PS, Generalized Predictive control. Automation [J]. 1989, 25 (6): 859-875
[6] PHAM DT, LIU X. Training of elman networks and dynamic system modeling [J]. International Journal of Systems Science, 1996,27 (2): 221-226
It is single signal transmission programmable led pixel strip. Only with One Data wire. the same as WS2811 and SK6812
But It is difference,the WS2812B is just addressable individually, IC just inside on the led.just have DC5V Working Voltage,can be control by extend controller to achieve the flash, movies and so on, Indoor and outdoor is suitable.
It is the most common single control led strips.
RGB LED Tape,WS2812B Rgb LED,WS2812B LED Strip,WS2812B Digital LED Strip
SHEN ZHEN SEL LIGHTING CO.,LTD , https://www.sel-lighting.com